開催案内 (pdf)
日本バーチャルリアリティ学会の2016年度年次大会において,拡張現実感を実現するためのカメラトラッキング技術に関するオンサイト型コンペティションを行います.本コンペティションは,昨年福岡で開催されたISMAR 2015のセッションの一つであるOn-site Tracking Competitionと同様のルールで開催されます.特に今回はISMAR 2015 Tracking Competitionのチャンピオングループを招待して,タイトル防衛戦のような趣向で開催する予定です.
本コンペティションはアルゴリズムの新規性ではなく,性能(安定性,位置・姿勢推定精度,タスク達成時間)で評価を行います.そのため,本ページで公開しているサンプルコードに独自のノウハウを少し入れて参戦するといったことでもOKです.
スケジュール
8月31日: 申し込み締め切り(6月上旬申し込み開始)
9月14日: オリエンテーション・会場下見
9月15日: トラッキングコンペティション本番
9月16日: トラッキングコンペティションまとめセッション
タスク
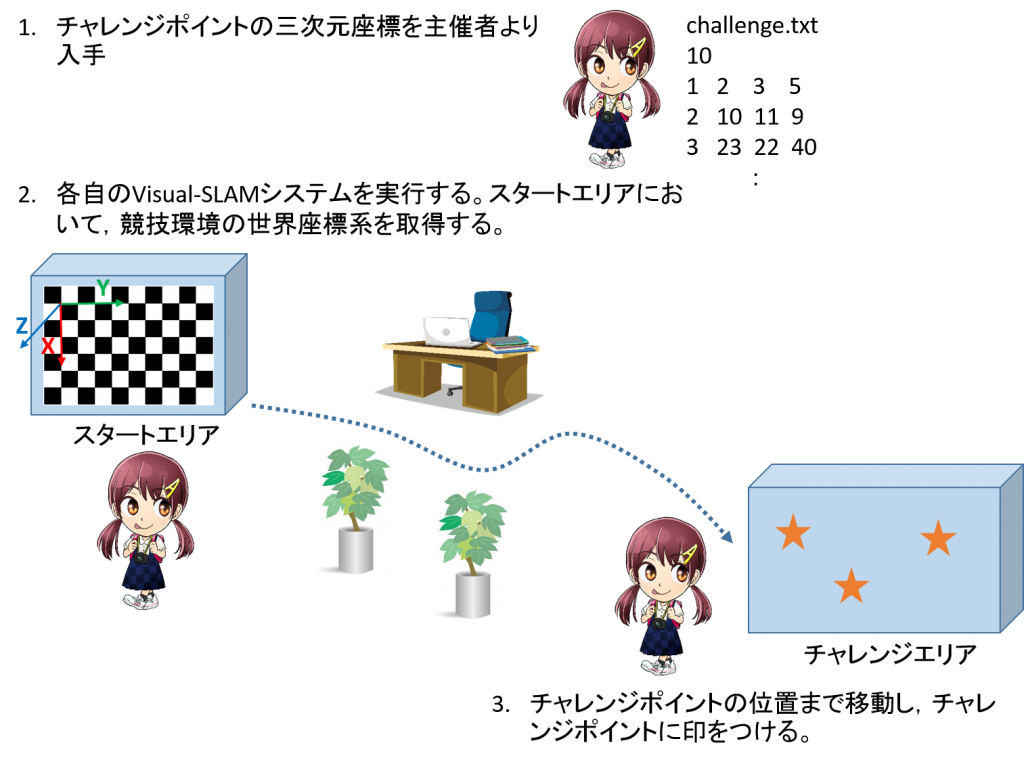
指定された環境内(競技当日に公開)で,参加者の構築したカメラトラッキング技術を用いて環境内におけるカメラ位置・姿勢を推定し,指定されたポイント(チャレンジポイント)を見つけます.
競技手順
参加者は,初めに,主催者よりチャレンジポイントの三次元座標が記載されたファイルを受け取ります.次に,スタートエリアにおいて競技環境の世界座標系を取得し,各チャレンジポイントまでシステムによるナビゲーションを行うことで,システムが提示するチャレンジポイントに印を付けていきます.競技終了後に,真のチャレンジポイントの位置と印の位置の差を計測し,精度を評価します.
競技環境
オフィス空間のような場所を想定しています.競技環境の大きさは8m × 8m程度の空間になる予定です.以下の写真はISMAR2015で開催されたOn-site Tracking Competitionの会場と競技風景です.



